Build Instructions (Version 2)
Before you start
- Skill level: beginner-friendly if you can 3D print + use a screwdriver.
- Time: first build usually takes a weekend.
- Goal: assemble + run the first motion test safely.
Rule #1: don’t force-fit parts. If it doesn’t fit, trim/sand gently.
1) Parts you’ll need (BOM)
Grab these parts before you start the build. Equivalent alternatives are fine as long as the specs match.
| Part | Qty | Buy link |
|---|---|---|
| ST3020 serial bus servos (arm servos) | x8 | |
| ST3215-HS 30kg serial bus servos (neck + torso) | x3 | |
| VSPRO high-speed camera (USB) | x1 | |
| 7.5V 10A Power Supply Adapter | x1 | |
| M3 countersunk machine screws (assortment) | x1 kit | |
| 20 AWG electrical wire | x1 |
Tip: buy the parts first, then do servo centering before assembly.
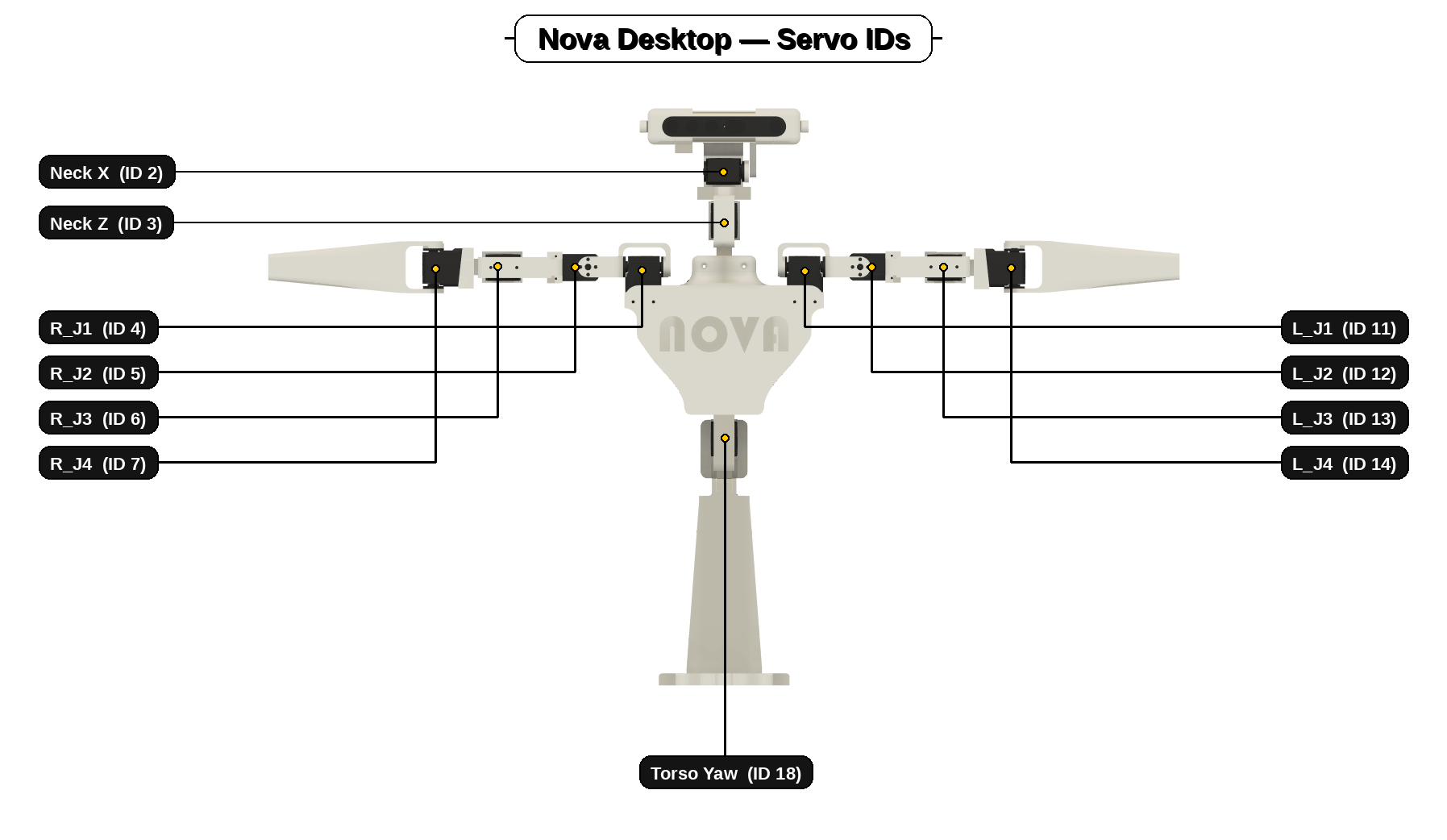
2) Setup — Set Servo ID's and center your servos first (do this BEFORE printing/assembly)
Mandatory. Center and ID servos before you install them.
If a horn can’t be perfectly straight because of spline steps: choose the closest, then correct later.
3) Servo driver setup (ESP32) — upload code + Wi-Fi details
Configure your ESP32 boards early so the rest of the build is smooth.
- Open the ESP32 code in the Arduino IDE
-
Install the SCServo library (FT&WS) in Arduino IDE
Go to Sketch → Include Library → Manage Libraries…
Search for SCServo and install “SCServo by FT&WS”.
Important: don’t add the library to the sketch manually — once installed via Library Manager, Arduino will include it automatically. - Set your Wi-Fi SSID + password
- Set your PC/laptop IP address for UDP (Windows: ipconfig → IPv4)
- Upload sketches to each ESP32 (arms + torso/neck)
- Confirm Wi-Fi status LED (white dot flashes when connected)
Tip: keep rear door open during setup so you can access boards.
4) Build Order (Recommended Sequence)
- Print base
- Print torso
- Mount servo drivers on rear door (arm driver top, torso/neck bottom)
- Attach rear door (leave open) until all servo cables are connected
- Print + assemble arms and neck, then slot into torso and connect
5) Arm Build
- Print arm parts and test-fit
- Install centered servos building outward (shoulder → forearm)
- Route cables as you go (avoid pinch points)
- Mount arms into torso, then plug into arm driver
6) Neck Build
- Print neck parts
- Assemble with centered servos
- Route cables with slack
- Mount neck into torso, then plug into torso/neck driver
7) Camera fitment (VSPRO)
Fit the camera mount and route USB with slack for full motion.
- Print camera brackets and clean supports
- Mount camera securely
- Route USB cable to avoid snagging during motion
8) Next: Software installation
Move onto the software installation guide.